728x90
반응형
Stereo
두개 이상의 뷰가 주어졌을 때 잃어버린 정보를 복원할 수 있는 방법
외눈박이일 경우 공간적으로 인식을 하는 건 불가능
두 개의 뷰가 있을 때 어떻게 3차원 정보를 복원하는지 알아보기
Epipolar geometry
카메라 간의 translating 을 통해서 연결되는 두 이미지를 찍을 수 있음
이는 epipolar lines 을 통해 찾을 수 있음

basci stereo matching algorithm

생각보다 어려움


보통 카메라는 임의의 위치와 구성으로 촬영이 되는데 일정한 기준이 필요하다.

이렇게 추가적인 카메라를 rectified cameras라고 한다.
이 카메라의 위치를 계산하는 방법
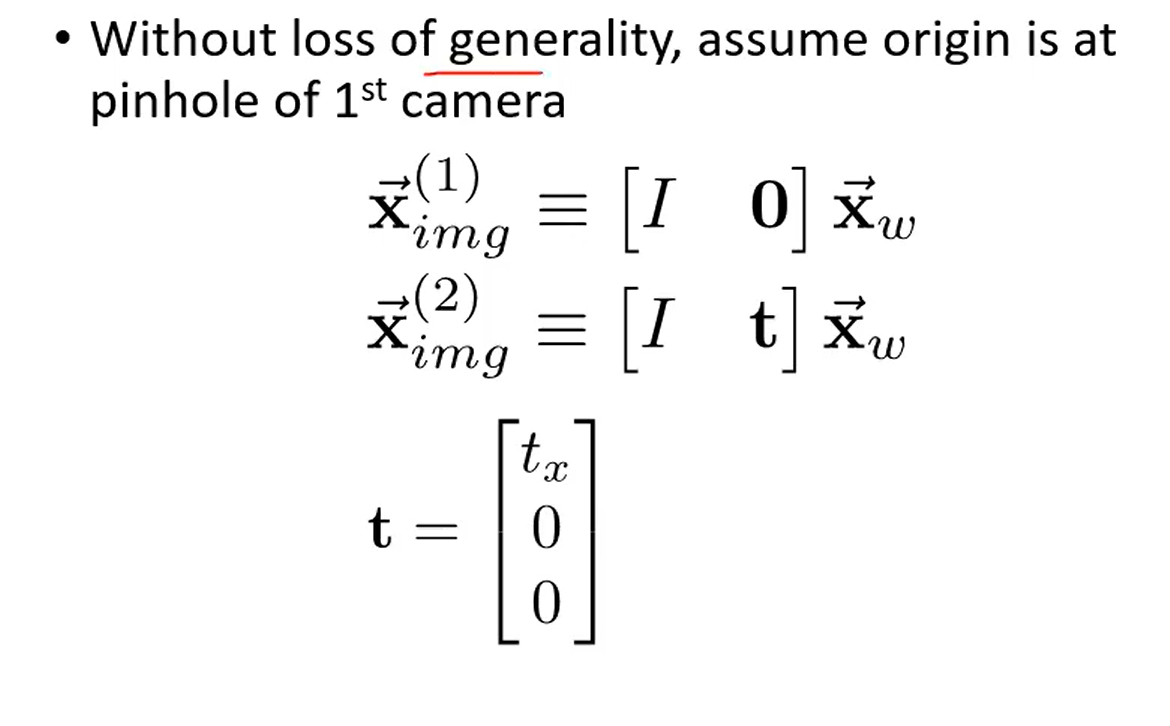
첫번째 카메라는 원점에 있다고 가정


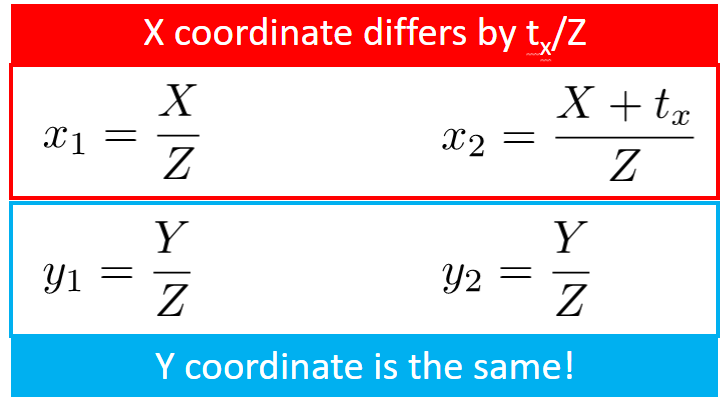

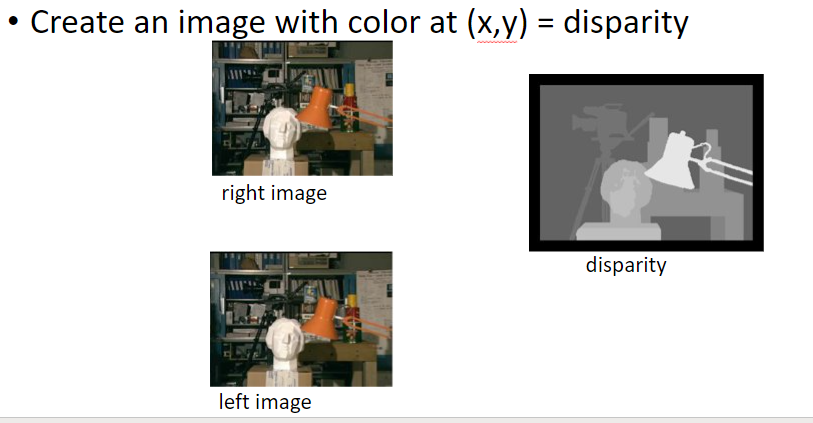
X축에서의 차이를 disparity 라고 한다.
disparity = baseline(tx)/depth

윈도우들 간에 비교를 할때 NCC 사용할 수 있음
lighting 과 color 변하기 않음
cross correlation

계산적으로 빠를 수 있음
NCC volume 계산 (MxNxD)

Plane sweep stereo


728x90
반응형
'공부 > 컴퓨터비젼' 카테고리의 다른 글
| [컴퓨터비젼 과제] 6. SVM(Support Vector Machine) (0) | 2021.05.27 |
|---|---|
| [컴퓨터비젼 과제] Epipolar Geometry (0) | 2021.05.14 |
| [컴퓨터 비젼] 11.Single-View Modeling (0) | 2021.04.18 |
| [컴퓨터 비젼] SIFT(Scale Invariant Feature Transform (1) | 2021.04.12 |
| [컴퓨터 비젼] 10. Panoramas (0) | 2021.04.12 |



